Some replies
ElectricRider66 (Kraig Schultz) - thanks for posting on the thread Kraig. Yes we have many similarities in our thinking, but more than you know because my first prototype was also electric!
Your deltabike project looks very interesting, once again we have many similarities in our thinking, specifically about standardization and open-sourcing. However I feel that the two illustrations on your website bring visual excitement at the cost of practicality, and I have some observations about the procedure that you may wish to discuss, please feel free to PM me if you want to open a discussion. Likewise I would value your thoughts about the aims of this project and my design solutions. Steering damper next on my list!
Benjamin T Ive been aware of the Hossak system for some time it seems to be a favourite of the English FF brigade, personally I remain to be convinced of its importance! My opinion is that telescopic forks, while far from perfect, function adequately. Just take a look at MotoGP bikes, with incredible loads and massive grip from slick tyres, ridden to absolute precision using this lightweight and simple technology whats not to like? My requirements for handling precision are likely to be far lower, and hence below the critical limit for performance.
Additionally, as is true of any prototype, I dont fully understand my handling requirements yet. Until I do, I want to use a known constant or control, which will allow me the chance to evaluate the vehicle handling hence use something familiar. If, a year from now, Im struggling with a handling anomaly, please feel free to remind me.
I am very grateful to you for the rule of ten and other manufacturing theories that I found at your suggestion. The principle of standardization would lend support to my idea of using off the shelf parts to reduce cost and complexity.
Big shafe just to clarify, I have two things to consider. Firstly, temporary support when stationary during a journey (stop lights) and secondly, permanent support when entering/exiting the vehicle (parking). Each solution must be independent of the other.
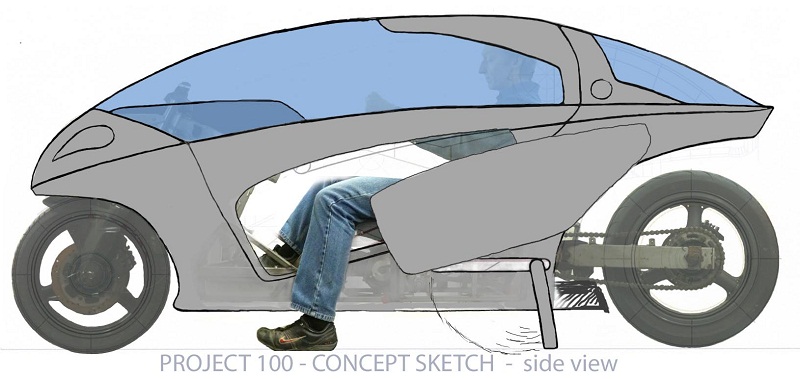
Stop lights. In the short term I will use access panels in the lower side area to allow the driver to place his/her feet on the roadway, just like a regular motorcycle. These panels will move independently of the top canopy, and will require a degree of automation. I like pneumatics for this task, but have not finalised a design yet.
Parking. The parking stand will comprise a pair of legs which need a fairly wide base, and so will deploy at about 45degrees (viewed from front). They must lock into an overcenter position to remain deployed for long periods, and must allow for suspension travel when the driver gets out. Therefore a degree of lifting is essential, which will require power assistance. I like pneumatics for this role too, specially as some synergy with the stop-light solution is possible. Here is an image of how I think it will all work