Man that is beautiful!
I sent in 2 files for new control and driver boards today. Adam had told me about the $33 for a single board thing they do, so I'm trying that. The power board is just going to have to wait until later, because it's friggen expensive to get the setup fee paid for it. So, this one will use the left over power board. I still want to try a high side power board, and I finished making one on the computer, but I think Joe's idea of just using what's already available makes a lot of sense.
On the new board, it has the "watchdog for the watchdog" feature. haha. You know, disable the mosfet driver if the microcontroller freezes up for more than 0.001 seconds. That circuit is tested and working. Also, it has adjustable hardware overcurrent trip point from about 50 amps up to around 1200 amps. I'm also going to change the code to allow for any max current you want. And for now, if the overcurrent trip point happens, it's going to flag a fault so that you have to lift the foot all the way off the throttle to clear it. Eventually the hardware overcurrent should never come on anyway.
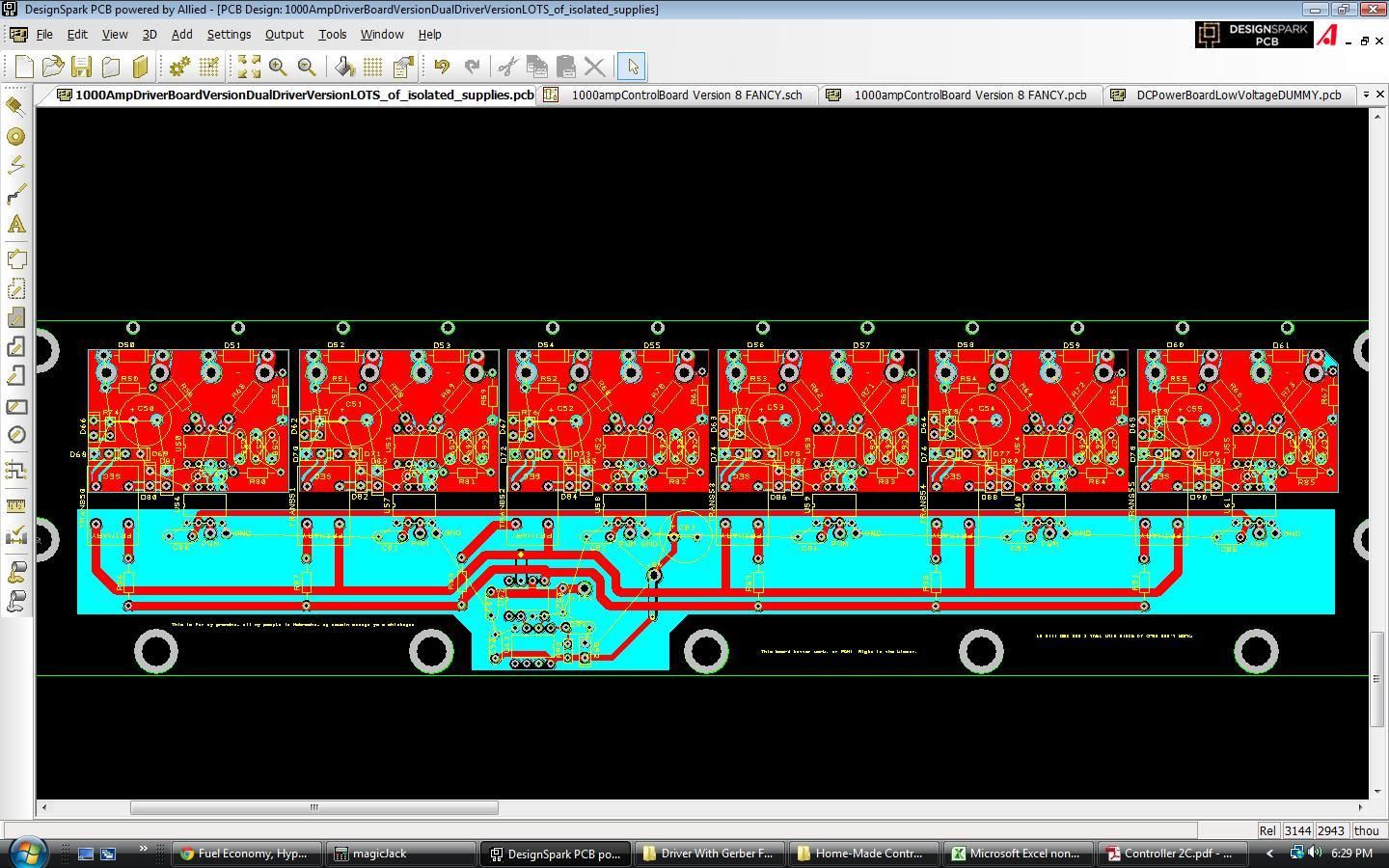
I'm using 6 shielded twisted pairs to go to each pair of mosfets on the driver board from the control board. Every path is as short as the packages I'm using will allow. Each mosfet has its own driver. The distance from mosfet driver output to mosfet leg is only the length of the body of the gate resistor. It can't be shorter with through hole parts.
6 isolated supplies. Unnecessary? Yes! hahaha. But I can use the driver boards unchanged in an AC controller too. Or a high side controller, or brushless DC controller. I also did a version that uses negative voltage on turnoff in case you want to use TO-247 package IGBTs instead, or just want the turn on and turn off of the mosfets to be the same.
I did some rewinding experiments with the line filters. They are VERY rewindable. Removing 5 wraps on the primary changed the result from 12v in, 4 supplies of 10.5v out, to 12v in, 4 supplies of 12.4v out. They agreed to +/- 0.005v.
I"m also going to change the software to allow Ben to have slower ramp up. Like as low as 62.5 amps per second if you floor it, all the way up to thousands of amps per second from flooring it. I still don't get why Ben's controller was so sensitive to the throttle though.