 03-29-2017, 12:37 PM
03-29-2017, 12:37 PM
|
#51 (permalink)
|
|
Master EcoModder
Join Date: Sep 2010
Location: Saskatoon, canada
Posts: 1,488
Thanks: 746
Thanked 565 Times in 447 Posts
|
Quote:
Originally Posted by HaroldinCR

Thingstodo, I have a whole complete Leaf system, with wiring harness, controller, AC compressor, motor/differential with axles, all bolted to original sub frame. You just have to move across the border to save on shipping.
|
Do you have the CAN codes to make the controller work?
I have not seen any reverse engineered codes for the Leaf as yet. I've seen a bit of work on the Battery packs/BMS
I was thinking I'd need to buy an operational Leaf to figure out the codes? 
__________________
In THEORY there is no difference between Theory and Practice
In PRACTICE there IS!
|
|
|

|
 Today Today
|
|
|
|
 Other popular topics in this forum...
Other popular topics in this forum...
|
|
|
|
|
03-29-2017, 01:49 PM
|
#52 (permalink)
|
|
Lurking Eco-wall-o-texter
Join Date: Dec 2015
Location: MPLS, MN area
Posts: 128
Thanks: 0
Thanked 66 Times in 45 Posts
|
Hello HaroldinCR,
Quote:
|
I have NO problem with mechanical stuff here. Just wait until I get ready to start trying to make a 2 speed electronic transmission. Y'all are in for some REAL sufferin.
|
Great, I can keep ranting.  As for the 2-speed electronic transmission, do you mean electronically controlled mechanical, or some sort of Wye-Delta electrical shifting? The first is solved if you don't mind harsh shifts, look up electro-pneumatic control of Lenco and Powerglide drag-racing automatic transmissions. Somebody may even have come up with a solenoid valvebody for a Powerglide, though I haven't looked for such a thing.
Hello again thingstodo,
Quote:
Originally Posted by thingstodo
Hmm. I was under the (mistaken?) impression that transferring torque to the wheel with traction, and not spinning the heck out of the wheel that has just lost traction, is a good thing.
|
Your impression is correct. There's just this odd corner of the performance envelope with "locker" or really aggressive "clutch type posi" rear ends that I've read about that can cause odd handling in very low traction corners.
Quote:
|
With 4 wheels commanded to turn the same speed, if the inner front one has traction, it pulls you along and you go a bit faster. The other three wheels still have power going to them, just not as much since the have less slip. If the front inner tire loses traction, you should still have traction on the two rear and the front outer, and you go a bit slower. If you break loose with all 4 tires ... 4 wheel skids are not fun ... but perhaps you were a bit aggressive in your driving style for conditions?
|
NOTE: I'm being theoretical. I've not yet driven an auto-locker equipped vehicle. The "aggressiveness" of the torque transfer will be the deciding factor in the road manners on low-traction surfaces in corners. If it happens relatively slowly/smoothly, no issue. You will have the ability to spin all four wheels, but you will be able to creep up on it. If it is fast/harsh, the vehicle will be twitchy.
Quote:
|
I am not a racer - my experience is somewhat lacking here. I just don't want to get stuck in mud, one wheel spinning madly while the other three sit there.
|
I'm no racer either. It will probably work fine for the mud situation. Having 1/4 of the vehicle's max torque capability at any one wheel will allow for continued forward movement when 3 of 4 wheels are slipping, provided the available torque and traction at that one remaining traction-available wheel is high enough to overcome the drag on the vehicle.
Quote:
Good point. I will likely have little regen in the simple case.
Is there an off-the-shelf mechanism that uses 2 belts on a dual pulley system, where one belt is tensioned to 'pull' at the drive pulley and the other belt is tensioned to 'push' at that same pulley, using idlers of some sort?
That likely does not make any sense without a sketch. I'll add one tonight.
|
Note that you need constant tension in order to have simple reverse as well. Backing up with a plain tensioner won't work - the belts will slacken.
You can use two tension wheels, tied together, or use a bolt-adjustable tensioner rather than a spring-adjusting tensioner. No need for two belts.
Please note that for any belt final drive to work you pretty much must have what amounts to a straight trailing or leading arm suspension. Otherwise the belt has to twist and change length as the suspension moves. Add dirt/mud/water/etc to the situation and it gets really difficult to keep the belt on the pulleys.
Quote:
|
Perhaps a Subaru AWD would be a better fit for me. But I'm not a mechanic. If I can solve a problem electrically instead of mechanically, I will. The ATV linkages, suspension parts, etc are out of the price range for now. They cost as much as many 4x4 truck parts.
|
Benefit to using an existing driveline: you can get every part you need by purchasing a wrecked/non-running whole vehicle. Craigslist or local equivalent. The most difficult challenge here is coupling each motor output to it's individual wheel. You have two practical off-the-shelf solutions available (ie, figured out and used a lot):
1: Drive the inboard end of a standard CV axle half-shaft, use conventional IFS/IRS suspension/hubs/etc. Pretty easy to get AWD, all you need to engineer is the mounting for the inboard ends of the CV axle half-shafts and their drive pulleys, plus the remaining mounting for the motor and any jack-shafts needed to get the reduction ratio you need. Flange-mounted CV's could allow just sandwiching the pulleys between the CV and the diff, and just gutting the diff of everything not needed to hold the drive flanges in and concentric.
2: Use a set of straight trailing swingarms in the rear - essentially two motorcycle rear ends, mirrored side to side so the pulleys are on the inside. Drive pulley is concentric with swingarm pivot, tension is set by moving the wheel/driven pulley closer to/further from the pivot. Pretty easy to get 2WD IRS this way, so long as you are OK with zero camber change with body roll/suspension travel. Doing leading or trailing arms for the front means figuring out how to bolt a CV jointed steering knuckle off the outer side of said arm, and beefing it up against the resulting twisting forces. Not easy.
Going with one bigger motor allows you to use complete standard AWD/4x4 driveline bits, with the only required mechanical engineering being adapting the motor to the input shaft. Use a recent traction-control equipped vehicle and the computer uses the brakes to slow down the spinning wheel, forcing the differential to shove an amount of torque equivalent to the braking force over to the wheel with traction. Add a Tor-sen or similar, and you get a 2.5-3.5 or so multiplier for that brake torque.
Two motors - one for each end - can still be run off the single controller, but you have double the amount of mechanical speed reduction hardware necessary, and still need to do the traction control for the left to right mechanically.
Quote:
I have little info on Leaf drivelines. Do they use an open differential and activate brakes to transfer torque to the wheel with traction? I would not object to using Leaf parts, I just need to learn a bunch of stuff. There are no wrecks up here to pull from. Leaf drivers seem more careful than Tesla drivers 
|
IIRC they use open diffs. Not sure what year they put in full TCS, but it uses power reduction and brake application to try and limit wheel spin. If there is not enough traction available from static friction, you're not going anywhere. Most of these systems don't allow you to rely on dynamic friction (spinning all the power-able tires), though the SUV's and sportier cars tend to have a way to disable the power-reduction part of the traction control. 3rd and 4th gen Ford Explorers apparently can do this, though it requires steady throttle control to keep it from "freaking out" and no longer working as desired. CAN bus controlled module to do it, too. Beyond my ken at this time, though I would LOVE if I could retrofit the newer ABS module, powered brake servo, and wheel sensors on both rear wheels (mine has just one on the pinion) to get it.
Note that brake-application traction control necessarily turns some of your battery power into heat while it is working. Dunno how more or less efficient that is than running at higher slip on the other motors. |
|
|
|
|
The Following 2 Users Say Thank You to cajunfj40 For This Useful Post:
|
|
|
03-29-2017, 02:07 PM
|
#53 (permalink)
|
|
Master EcoModder
Join Date: Aug 2012
Location: northwest of normal
Posts: 29,344
Thanks: 8,347
Thanked 9,111 Times in 7,524 Posts
|
That's cute. 
Quote:
|
If you break loose with all 4 tires ... 4 wheel skids are not fun ... but perhaps you were a bit aggressive in your driving style for conditions?
|
It was black ice, you 'insensitive clod'.
Quote:
|
If I remember correctly, 1 motor for 1 controller works pretty well like a differential. One wheel takes the load, the other just tags along. Just use 1 throttle.
|
Let the road be the great equalizer, like a 'through-the-road' hybrid? But still you could poll each motor's resolver and fine-tune things in software. |
|
|
|
|
03-29-2017, 06:01 PM
|
#54 (permalink)
|
|
EcoModding Apprentice
Join Date: Mar 2009
Location: Costa Rica
Posts: 138
Thanks: 24
Thanked 47 Times in 39 Posts
|
Freebeard
I did receive some "Can" lines from the seller. All I know is, there must be someone out there that can access that stuff. On another forum, there is hints that the entire ? info?, I'm not knowledgible of any code stuff, But, I'm near certain that Leaf code has been hacked.
About the differential locker or not stuff, The guy that I know about, built a Delta trike from bicycle stuff and whatever he could find laying around. He has 2 hubmotors on the rear. He travels 20 MPH max., and can make turns without lifting the inside wheel, usually.
He has a long blog type thread, so, I will have to read through it to get that exact info and post it here, IF it might be useful.
By the way, where are all the controller hackers/builders hiding ? I have 22 days before I start disassembling 3 OEM controllers to see what I can scrounge for parts. Then, I have 18 days to make sure I have enough parts to try to build/buy/whatever, a workable controller. It's pure D hell getting stuff shipped into this country. 
About the 2 speed thing: Delta/Wye switching might work. Also, the voltage doubler might work, IF I can locate a Prius inductor, and an electric motor can be wound up a long ways above rated RPM's, so, why can't I gear low enough to pull the problem areas and then use the voltage doubler for maintaining higher speeds, as long as that feature is controllable ? I am constantly being shot down over this idea ? I can even liquid (mineral Oil) cool the motor AND controller. What's the big deal ?
I made up a trial geared 2 speed, using wooden sides and 600cc tranny gears. It turns reasonably well with just oiling the wood where the shafts go through, although straight gear teeth are noisy. It has dog clutch shifting, geared at 1.15:1 and 2:1. (That may need to be reversed) Enclosing and cooling is not so tough, but, how to lube the gears without gear oil leaking out and getting under the rear tire ?? THIS is why I want electronic gearing.
Also, need to sell this Leaf stuff and the battery modules. ")
Also, I keep forgetting about the "Thank You" feature on this site. I need to start using that. |
|
|
|
|
03-29-2017, 06:52 PM
|
#55 (permalink)
|
|
Master EcoModder
Join Date: Sep 2010
Location: Saskatoon, canada
Posts: 1,488
Thanks: 746
Thanked 565 Times in 447 Posts
|
Quote:
Originally Posted by HaroldinCR
By the way, where are all the controller hackers/builders hiding ? I have 22 days before I start disassembling 3 OEM controllers to see what I can scrounge for parts. Then, I have 18 days to make sure I have enough parts to try to build/buy/whatever, a workable controller. It's pure D hell getting stuff shipped into this country. |
A populated controller from Paul Holmes is the way I went (I also got a full AC Controller from him, and a DC controller .. so I *MAY* be a bit biased). The controller board fits in carry-on and was, I think, about $300. Under 5 lbs. I am putting Paul's controller onto an known-good but old ... Allan Bradley 1333 drive that has pooched current sensors. It will upgrade the thing from V/Hz or V/F to vector motor control, and from proprietary stuff that no one remembers to stuff I *COULD* change if I wanted to, and wanted to learn how to ... but I have the schematics and the source code so I can fix it as well.
Paul will likely ship it to you in parts, or any other way that would make it easier to bring in. I would not recommend getting the board built locally and doing your own component sourcing if you have trouble importing parts 
Quote:
|
About the 2 speed thing:..., the voltage doubler might work, IF I can locate a Prius inductor, and an electric motor can be wound up a long ways above rated RPM's, so, why can't I gear low enough to pull the problem areas and then use the voltage doubler for maintaining higher speeds, as long as that feature is controllable ? I am constantly being shot down over this idea ? I can even liquid (mineral Oil) cool the motor AND controller. What's the big deal ?
|
I would like to try this method as well. It allows for 48V .. or a lower pack voltage in any case .. for use in town. No boost control up to your 48V .. then control the duty cycle of your boost to adjust for max speed and for max current.
I have been warned that the rotors in 3 phase AC motor are not balanced for 3X rated speed (1800 rpm rated, 5400 rpm is 3X) but I have put some metal between me and the motor and tested a 5 HP industrial AC motor to these speeds. Not with full load, but with over half load.
The torque falls off above 1780 rpm unless you keep increasing the voltage to maintain rated current ... and it heats up *FAST* ..
Sorry ... I'm writing a book again ... time to stop!
__________________
In THEORY there is no difference between Theory and Practice
In PRACTICE there IS!
|
|
|
|
|
03-29-2017, 07:10 PM
|
#56 (permalink)
|
|
Master EcoModder
Join Date: Aug 2012
Location: northwest of normal
Posts: 29,344
Thanks: 8,347
Thanked 9,111 Times in 7,524 Posts
|
Quote:
I did receive some "Can" lines from the seller. All I know is, there must be someone out there that can access that stuff. On another forum, there is hints that the entire ? info?, I'm not knowledgible of any code stuff, But, I'm near certain that Leaf code has been hacked.
...
By the way, where are all the controller hackers/builders hiding ?
...
About the 2 speed thing: ...I made up a trial geared 2 speed
|
Have you looked at evtv.me? Over the years they've gone from Curtis controllers to their own GEVCU, to controlling the Tesla through CAN bus messaging. They have the tools and techniques and 10s of hours of videos spanning years.
________
More locally, right here in Fossil Fuel Free, notably Open ReVolt: open source DC motor controller - Fuel Economy, Hypermiling, EcoModding News and Forum - EcoModder.com and http://ecomodder.com/forum/showthrea...ler-10839.html
________
For two speeds minimizing complexity suggests a planetary gear. My Lexus MGR is single speed, but it has a jackshaft and differential that's very compact because no ring gear.
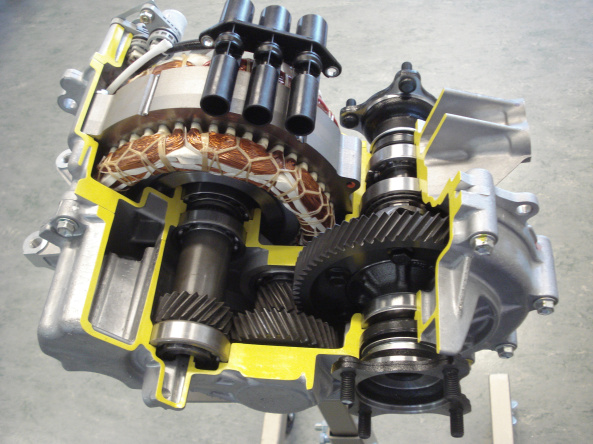
Three times the power and weight, though.
|
|
|
|
|
03-29-2017, 07:50 PM
|
#57 (permalink)
|
|
EcoModding Apprentice
Join Date: Mar 2009
Location: Costa Rica
Posts: 138
Thanks: 24
Thanked 47 Times in 39 Posts
|
I'm not against building a control board. I just have no idea how to tie it to a power board and whatever else is needed, then, how to program things.
That's why I tagged into Paul's thread. I was hoping Paul would put together kits with the controller circuit board and parts, then I could work on that, but, I would need a lot of help with testing each section and then, adding whatever other boards/parts to get to where I want to be. That's why I never threw away the 2 Ford controllers and bought the Honda controller, all for parts. The Honda controller is not as large and is a lower voltage which is somewhat what I think I need. It's also NOT a Can system, so, might not be what I need ?
IF I need to create a circuit board or 2-3, I have no idea how to do the layout and such.
I would really like to see Paul get on here and help me decide what I need to do. I know he's busy, so, I haven't bugged him.
Last edited by HaroldinCR; 03-29-2017 at 08:19 PM..
|
|
|
|
|
03-30-2017, 02:07 PM
|
#58 (permalink)
|
|
EcoModding Apprentice
Join Date: Mar 2009
Location: Costa Rica
Posts: 138
Thanks: 24
Thanked 47 Times in 39 Posts
|
Is there a latest parts list or parts pkg that would go with Paul's controller board ? I don't think I need any power components if I use OEM recovered parts ?
Hope this helps someone figure out how the controller needs to be built for a SR motor:
Switched-reluctance drive basics
A typical switched-reluctance setup includes four components the motor, a power converter, a logic circuit, and sensors. Power converters for switched-reluctance motors require only one switch in series per phase windings because the torque is independent of current polarity. Each phase is independent, so the failure of one does not bring the whole motor down. There are a few types of converters:
stepper-drives-FAQ-11-motor-reluctance-1-2
This is an example asymmetric bridge converter for three phases.
Asymmetric bridge converters involve turning on two switches per phase. If the current gets too high, these switches are turned off.
This configuration stores energy in the motors phase windings to keep current flowing in the same direction until it depletes.
(n+1) switches and diodes are more efficient than asymmetric bridge converters.
This is because this configuration allows the power devices to share switch operation. (n+1) does have restricted control when phases overlap, however.
stepper-drives-FAQ-11-motor-reluctance-1-3
This configuration is known as (n+1) switches and diodes because there are three phases but four switches and four diodes.
Bifilar drives contain bifilar windings. Bifilar refers to two wires wound around a common core.
Inserting these windings allows the circuit to restore magnetic energy. The voltage in the switches can be much higher than that of the voltage source. However, bifilar windings are complex.
A C-dump converter also recovers energy. It contains a capacitor the can resend stored magnetic energy back to the DC source. This setup uses a minimal amount of power switches which allows independent phase control.
However, there is a drawback of limited commutation because of the voltage difference between the capacitor and the supply. Any energy circulating between the capacitor and the connection causes additional losses in the switched-reluctance motor itself.
stepper-drives-FAQ-11-motor-reluctance-1-4
The bifilar windings shown here restore magnetic energy.
Sensors are another component of switched-reluctance motor drives. These can come as a variety of encoders.
There were images/schematics of the mentioned paragraphing, but, they didn't come over.
Link to where I found this info.
Last edited by HaroldinCR; 03-30-2017 at 02:12 PM..
|
|
|
|
|
03-30-2017, 05:56 PM
|
#59 (permalink)
|
|
Master EcoModder
Join Date: Sep 2010
Location: Saskatoon, canada
Posts: 1,488
Thanks: 746
Thanked 565 Times in 447 Posts
|
Quote:
Originally Posted by HaroldinCR
Is there a latest parts list or parts pkg that would go with Paul's controller board ? I don't think I need any power components if I use OEM recovered parts ?
|
The power components should work in the OEM drives. The only things I can think of would be to provide a power supply for Paul's controller, and to ensure that your battery voltage is not higher than the OEM controller was designed for. Paul's controller has been tested to 400V. My first AC controller was tested using a 405V bus. The control boards (2) I will be using on 350V for the first one, then a 900V bus on the second one. But I'm slow and have still to get my Mazda conversion on the road, so it will be a while.
Paul's controller board - bare board https://www.ecwid.com/store/pandspow...egory=16287307
For programming I used a PICKIT III. That's for the PIC on the controller. The regulator is an ATtiny and Paul lists a avrisp mkii to program that.
I don't see a kit package for the PIC, the resistors, caps, connectors, etc in the store. I'm not sure if he's still working on the kit. When I originally asked, I think he sent me a link to his shopping cart for the AC controller. I mentioned that my complete AC Controller is serial #2, so things have changed quite a bit. I don't think that parts list will help you. He's using more surface mount stuff than through-hole stuff now. So I guess I can't help you with the parts list
If you are not confident soldering, I would suggest the pre-built board. At least for your first one. When you are not confident, and things don't work immediately ... it could be your soldering, or your cables, or your motor, or your programmer ... it's tough to troubleshoot and get the first one running. After the first one is running, you can solder a new board, then swap it into a running system (on your bench) and it is easier to figure out what may be wrong.
Quote:
Hope this helps someone figure out how the controller needs to be built for a SR motor:
Switched-reluctance drive basics
A typical switched-reluctance setup includes four components the motor, a power converter, a logic circuit, and sensors. Power converters for switched-reluctance motors require only one switch in series per phase windings because the torque is independent of current polarity. Each phase is independent, so the failure of one does not bring the whole motor down. There are a few types of converters:
stepper-drives-FAQ-11-motor-reluctance-1-2
This is an example asymmetric bridge converter for three phases.
Asymmetric bridge converters involve turning on two switches per phase. If the current gets too high, these switches are turned off.
This configuration stores energy in the motors phase windings to keep current flowing in the same direction until it depletes.
(n+1) switches and diodes are more efficient than asymmetric bridge converters.
This is because this configuration allows the power devices to share switch operation. (n+1) does have restricted control when phases overlap, however.
stepper-drives-FAQ-11-motor-reluctance-1-3
This configuration is known as (n+1) switches and diodes because there are three phases but four switches and four diodes.
Bifilar drives contain bifilar windings. Bifilar refers to two wires wound around a common core.
Inserting these windings allows the circuit to restore magnetic energy. The voltage in the switches can be much higher than that of the voltage source. However, bifilar windings are complex.
A C-dump converter also recovers energy. It contains a capacitor the can resend stored magnetic energy back to the DC source. This setup uses a minimal amount of power switches which allows independent phase control.
However, there is a drawback of limited commutation because of the voltage difference between the capacitor and the supply. Any energy circulating between the capacitor and the connection causes additional losses in the switched-reluctance motor itself.
stepper-drives-FAQ-11-motor-reluctance-1-4
The bifilar windings shown here restore magnetic energy.
Sensors are another component of switched-reluctance motor drives. These can come as a variety of encoders.
There were images/schematics of the mentioned paragraphing, but, they didn't come over.
Link to where I found this info.
|
Is this a pure switched relutcance motor? The ones that Toyota were using kinda started as induction motors, when the switched reluctance torque was not very large and the control became more complex as the motor sped up. At top speed it was more switched reluctance than induction.
Did I get that right freebeard?
__________________
In THEORY there is no difference between Theory and Practice
In PRACTICE there IS!
|
|
|
|
|
03-30-2017, 06:32 PM
|
#60 (permalink)
|
|
Master EcoModder
Join Date: Aug 2012
Location: northwest of normal
Posts: 29,344
Thanks: 8,347
Thanked 9,111 Times in 7,524 Posts
|
I decline the role of ex-spurt.
My understanding is that HSD uses magnets buried in the laminations to counter back-EMF that develops toward the top of the rpm range.
I retain this stuff for a short while after reading it. Two big fat wires is DC, three big fat wires is poly-phase DC which is sort of a half-wave AC. Or something.
Sorry. 
|
|
|
|
|

























